
Abstract
In this paper, we consider the delay dynamic equation

Based on Lyapunov’s method, we study global attractivity of the trivial solution of (\(*\)). Our new result generalizes some well-known results in the theory of difference and differential equations to dynamic equations of the form (\(*\)). We also present some examples on nonstandard time scales to illustrate the importance of the new result.
Similar content being viewed by others

1 Introduction
The stability theory has proven to be a versatile and effective tool in comprehending the behaviour of solutions in differential equations in recent years. Over the last few decades, the theory of dynamic equations on time scales has played a pivotal role in bridging the gap between difference and differential equations [2]. Notably, significant results on uniform global asymptotic stability in differential equations [22] and difference equations [6] were extended to the theory of dynamic equations by Wu and Zou in their work [20] (also discussed in [10]). In this direction, Braverman and Karpuz [4] unified the results for differential equations [15] and for difference equations [7]. While some studies in the time scale literature have generalized classical forms like difference equations, q-difference equations, and differential equations, it is essential to note that extending results from these fields to dynamic equations is not always straightforward. In some cases, this process necessitates the development of new tools within the framework of time scale calculus.
Let us now start introducing the objective of this paper. In 1994, Yu and Cheng [21] presented a general form of the following stability test for neutral difference equations with delay.
Theorem A
(Cf. [21, Theorem 2]) Suppose that \(\{p_{n}\}_{n=0}^{\infty }\) is a nonnegative sequence and \(\tau \) is a nonnegative integer such that
Then, the trivial solution of
is globally attracting.
A continuous counterpart of Theorem A for neutral differential equations with positive and negative coefficients is considered by Shen and Yu. They have obtained the following result as corollaries of their more general main result.
Theorem B
[19, Corollary 1 and Corollary 2] Suppose that \(p\in \textrm{C}([0,\infty ),[0,\infty ))\) and \(\tau \ge 0\) such that
Then, the trivial solution of
is globally attracting.
It is a natural question to ask if Theorems A and B can be generalized to time scales for linear delay dynamic equations. In this work, we aim to give a positive answer to this question. However, the proofs on time scales require very technical computations, which may lead to some expansions in the field of dynamic equations.
In this paper, we consider the linear delay dynamic equation
where \(\mathbb {T}\) is a time scale unbounded above, \(p\in \textrm{C}_{\textrm{rd}}([t_{0},\infty )_{\mathbb {T}},[0,\infty )_{\mathbb {T}})\) and \(\tau \) satisfies the following two conditions.
-
(C1)
\(\tau \in \textrm{C}_{\textrm{rd}}([t_{0},\infty )_{\mathbb {T}},\mathbb {R})\) satisfies \(\tau (t)\le {}t\) for all \(t\in [t_{0},\infty )_{\mathbb {T}}\) and \(\lim _{t\rightarrow \infty }\tau (t)=\infty \).
-
(C2)
\(\tau \in \textrm{C}_{\textrm{rd}}^{1}([t_{0},\infty )_{\mathbb {T}},\mathbb {R})\) satisfies \(\tau ^{\Delta }(t)>0\) for all \(t\in [t_{0},\infty )_{\mathbb {T}}\) and \(\tau (\mathbb {T})=\mathbb {T}\).
Due to (C2), \(\tau ^{-1}:\mathbb {T}\rightarrow \mathbb {T}\) exists. Let us define \(t_{-1}:=\inf \{\tau (t),\ t\in [t_{0},\infty )_{\mathbb {T}}\}\), which is a finite value by (C1).
Next, we have two definitions for the completeness of the structure of the paper.
Definition 1
(Solution) A function \(x:[t_{-1},\infty )_{\mathbb {T}}\rightarrow \mathbb {R}\), which is rd-continuous on \([t_{-1},t_{0}]_{\mathbb {T}}\) and \(\Delta \)-differentiable on \([t_{0},\infty )_{\mathbb {T}}\) with an rd-continuous derivative, is called a solution of (1) provided that it satisfies the equality (1) identically on \([t_{0},\infty )_{\mathbb {T}}\).
Definition 2
(Globally Attractivity) The trivial solution of (1) is said to be globally attracting if any solution x of (1) satisfies \(\lim _{t\rightarrow \infty }x(t)=0\).
We mention here the papers [6,7,8, 14] and [12, 13, 15, 16, 19, 22,23,24], which deal with asymptotic behaviour of difference equations and differential equations, respectively. We also refer the readers to the papers [1, 3, 5, 9, 10, 17, 18] for a discussion on asymptotic behaviour of solutions of dynamic equations on time scales.
The paper is organized as follows. In Sect. 2, we state our main theorem, which generalizes Theorems A and B to time scales. Section 3 includes auxiliary lemmas required in the proof of the main theorem. The proof of the main theorem is given in Sect. 4. In Sect. 5, there are two numerical examples illustrating applicability and importance of the main result. Section 6 is dedicated to conclusions. Finally, in Appendices A and B, we give some basic results on time scales required in the proofs of our lemmas.
2 Main Result
The main result of the paper is presented below.
Theorem 1
Assume (C1), (C2),
and
Then, the trivial solution of (1) is globally attracting.
3 Preparatory Lemmas
The main result is motivated by the following important observations.
Lemma 1
If (C1) and (2) hold, then every convergent solution of (1) tends to zero.
Proof
Let x be a solution of (1), which tends to some constant \(\ell \in \mathbb {R}\). If \(\ell \ne 0\), we may assume without loss of generality that \(\ell >0\). Then, we can find \(t_{1}\in [t_{0},\infty )_{\mathbb {T}}\) such that \(x(t),x(\tau (t))>\frac{\ell }{2}>0\) for all \(t\ge {}t_{1}\). In view of (1), we see that
for \(t\in [t_{1},\infty )_{\mathbb {T}}\). Due to (2), there exists a sufficiently large \(t_{2}\in [t_{1},\infty )_{\mathbb {T}}\) such that
By integrating (4), and then using (5), we see that
This contradiction completes the proof. \(\square \)
In the next result, we will define a companion function to get some information on the solutions of (1).
Lemma 2
Suppose that (C1) and (C2) hold. Let x be a solution of (1), and define the companion function
If y converges to some value, then x also converges to the same value.
Proof
Suppose x is a solution of (1) and y defined by (6) converges to \(\ell \). We will show that x converges to \(\ell \). It follows that
for all \(t\in [t_{0},\infty )_{\mathbb {T}}\) (see Theorem 2 and Theorem 3). Integrating (7) from \(t_{1}\) to \(\infty \), where \(t_{1}\in [t_{0},\infty )_{\mathbb {T}}\) is sufficiently large, we have
Note that
(see Theorem 4). We claim that
Indeed, letting
we see from (8) that
since \(\lim _{t\rightarrow \infty }\tau ^{-1}(t)=\infty \) because of \(\lim _{t\rightarrow \infty }\tau (t)=\infty \). Therefore, we estimate
which proves (9). Rewriting (6) in the form
and considering (9) yields that \(x(t)\rightarrow \ell \) as \(t\rightarrow \infty \). This completes the proof. \(\square \)
4 Proof of the Main Result
In view of Lemmas 1 and 2, in order to show that the trivial solution of (1) is globally attracting, that is, every solution x tends to zero, we shall need a sufficient condition such that for every solution x of (1), the function y defined by (6) will tend to a constant.
Before proceeding to the next result, we compute
for \(t\in [t_{0},\infty )_{\mathbb {T}}\). Note that we have applied the inequality \(2\alpha \beta \le \alpha ^{2}+\beta ^{2}\) in the fourth step above.
Lemma 3
Assume (C1), (C2) and
Then, every solution of (1) tends to a constant.
Proof
We shall construct a nonnegative Lyapunov functional V, which is eventually nonincreasing along solutions of (1). Let x be a solution of (1), and let y be defined by (6). Define Lyapunov functional V by
where
In view of (10), we estimate that
for \(t\in [t_{0},\infty )_{\mathbb {T}}\). In view of (11), there exists \(t_{1}\in [t_{0},\infty )_{\mathbb {T}}\) and \(\varepsilon \in \mathbb {R}^{+}\) such that
Thus, we get
Therefore, \((V\circ {}x)\) is nonnegative and nonincreasing on \([t_{1},\infty )_{\mathbb {T}}\). This shows that
By integrating the inequality (12) from \(t_{1}\) to \(\infty \), we have
By using (11), we obtain
which together with (13) implies
Combining (13) and (14), we find
We assert further that y converges. The proof is clear if \(\ell =0\). Let \(\ell >0\). We claim that y cannot be oscillatory. Assume the contrary that y is oscillatory. Then, there exist \(\delta \in (0,\sqrt{\ell })_{\mathbb {R}}\) and \(t_{2}\in [t_{1},\infty )_{\mathbb {T}}\) such that
and let
Since y is oscillatory, I and J are unbounded and satisfy \(J_{-}\cup {}J_{+}=[t_{2},\infty )_{\mathbb {T}}\). Hence, we may pick an increasing divergent sequence \(\{s_{k}\}_{k\in \mathbb {N}}\subset [t_{2},\infty )_{\mathbb {T}}\) (i.e., \(s_{k+1}>s_{k}\) for \(k\in \mathbb {N}\) and \(s_{k}\rightarrow \infty \) as \(k\rightarrow \infty \)) such that \(\{s_{k}\}\subset {}J_{+}\) and \(\{\sigma (s_{k})\}\subset {}J_{-}\). Then, \(y(s_{k})>0\) and \(y^{\sigma }(s_{k})<0\) for all \(k\in \mathbb {N}\). Furthermore, by (15), we easily see that
and
then
It follows from (7) that
for all \(k\in \mathbb {N}\). By using (11), we obtain the following inequality
for all \(k\in \mathbb {N}\). From (17) and (18), we have
but \(\sum _{k=1}^{\infty }2\bigl (\sqrt{\ell }-\delta \bigr )^{2}=\infty \), which is a contradiction. Therefore, y cannot be oscillatory. If y is either eventually positive or eventually negative, then \(\lim _{t\rightarrow \infty }y(t)=\sqrt{\ell }\) or \(\lim _{t\rightarrow \infty }y(t)=-\sqrt{\ell }\), respectively. By Lemma 2, every solution x of (1) converges to some value, and this completes the proof. \(\square \)
Proof of Theorem 1
The proof is an immediate consequence of Lemmas 1 and 3. \(\square \)
5 Some Examples
We start this section with a numerical example on a particular isolated time scale.
Example 1
Let \(\mathbb {T}=\{\ldots ,0,1,3,6,7,9,12,\ldots \}=\cup _{k\in \mathbb {Z}}\{6k,6k+1,6k+3\}\), and consider the equation
where
Comparing (20) with (1), we see that \(\tau (t)=\rho (t)<t\) for all \(t\in \mathbb {T}\), and \(\tau ^{-1}(t)=\sigma (t)\) for \(t\in \mathbb {T}\). Further, \(\tau ^{\Delta }(t)=\frac{t-\rho (t)}{\mu (t)}>0\) for all \(t\in \mathbb {T}\), i.e., \(\tau \) is differentiable, increasing and that \(\tau (\mathbb {T})=\mathbb {T}\). Next, we compute that
and
Hence, conditions of [4, §6] and [20, Theorem 1.2] (see also [10]) fail to hold. Fortunately,
which shows by Theorem 1 that the trivial solution of (20) is globally attracting.
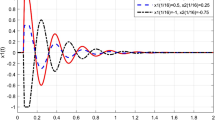
In Fig. 1, we have the plots of the solutions \(x_{1}\) and \(x_{2}\), which have the initial conditions \(x(-3)=0\), \(x(0)=1\), and \(x(-3)=1\), \(x(0)=0\), respectively.

Graphic of the solutions \(x_{1}\) (blue) and \(x_{2}\) (red) on \([-3,45]_{\mathbb {T}}\)
We can simply compute \(x_{1}\) as
which satisfies \(\lim _{t\rightarrow \infty }x(t)=0\). But, it is not very easy to compute the solution \(x_{2}\) explicitly. Due to the superposition principle, we can say that any solution x of (20) is of the form \(x(t)=x(-3)x_{1}(t)+x(0)x_{2}(t)\) for \(t\in [-3,\infty )_{\mathbb {T}}\). It can be also seen from Fig. 1 that \(\lim _{t\rightarrow \infty }x(t)=0\).
Next, we give an example on a time scale, which is a union of closed intervals of length 1.
Example 2
Let \(\mathbb {T}=\mathbb {P}_{1,1}=\cup _{k\in \mathbb {Z}}[2k,2k+1]_{\mathbb {R}}\), and consider the equation
where
Comparing (21) with (1), we see that \(\tau (t)=t-2<t\) for all \(t\in \mathbb {T}\), and \(\tau ^{-1}(t)=t+2\) for \(t\in \mathbb {T}\). Further, \(\tau ^{\Delta }(t)\equiv 1>0\) for all \(t\in \mathbb {T}\), i.e., \(\tau \) is differentiable, increasing and that \(\tau (\mathbb {T})=\mathbb {T}\).

Graphic of the coefficient p on \([0,9]_{\mathbb {T}}\)
It should be mentioned here that \(\min _{t\in \mathbb {T}}\{\mu (t)\}=0\), \(\max _{t\in \mathbb {T}}\{\mu (t)\}=1\) and \(\max _{t\in \mathbb {T}}\{t-\tau (t)\}=2\).

Graphic of the integral of the coefficient p from \(\tau (t)\) to \(\sigma (t)\) for \(t\in [0,9]_{\mathbb {T}}\)
Now, we compute
showing that conditions of [4, §6] and [20, Theorem 1.2] (see also [10]) fail to hold.

Graphic of the integral of the coefficient p from t to \(\tau ^{-2}(\sigma (t))\) for \(t\in [0,9]_{\mathbb {T}}\)
On the other hand, we compute that
This shows that the conditions of Theorem 1 hold, i.e., the trivial solution of (21) is globally attracting.
Due to Theorem 1, the trivial solution of (21) is globally attracting. A solution of (21) is plotted in Fig. 2 showing that \(\lim _{t\rightarrow \infty }x(t)=0\) (Figs. 3, 4, 5).

Graphic of a solution x on \([-2,31]_{\mathbb {T}}\) under the initial condition \(x(t)=0\) for \(t\in [-2,-1]_{\mathbb {T}}\) and \(x(0)=1\)
6 Final Comments
In this section, we make our final comments to conclude the paper. We will start with a remark that holds trivially for the well-known time scales \(\mathbb {T}=\mathbb {R}\) and \(\mathbb {T}=\mathbb {Z}\) with a delay in the linear form.
Remark 1
Suppose that \(\tau \circ \sigma =\sigma \circ \tau \), then
Hence, the condition in [4, §6 (i)] implies Theorem 1 under the condition \(\tau \circ \sigma =\sigma \circ \tau \).
The key point in this paper is to assume conditions such that \(\tau (\mathbb {T})=\mathbb {T}\) holds. This enables us to use the substitution formula in integrals on time scales (see Theorem 4). Note that for the classical types of equations
and
the condition \(\tau (\mathbb {T})=\mathbb {T}\) holds trivially. For more general special types of dynamic equations
and
one can easily see that (C2) holds too. h-difference equations and q-difference equations can be considered under a more general class, that is, dynamic equations on isolated time scales. In this case, with a delay term of the form \(\tau (t)=\rho ^{k}(t):=(\rho \circ \rho ^{k-1})(t)\) and \(\rho ^{0}(t):=t\) for \(t\in \mathbb {T}\) and \(k\in \mathbb {N}_{0}\), (C2) also holds.
We would like to emphasize that Theorem 1 generalizes Theorems A and B to arbitrary time scales. It is also important to mention that Theorem 1 cannot be compared with the results in [4] and [20]. Hence, it is new in the stability theory of dynamic equations.
Finally, we would like to mention that the main result of this paper can be extended to dynamic equations of the neutral form
where the coefficients p, q, r and the delays \(\alpha ,\beta ,\gamma \) satisfy suitable conditions (cf. [11]). However, we prefer demonstrating our results on the simple equation (1) because the key point behind the idea can be presented without getting lost in computational details.
References
Akin-Bohner, E., Raffoul, Y.N., Tisdell, C.: Exponential stability in functional dynamic equations on time scales. Commun. Math. Anal. 9(1), 93–108 (2010)
Bohner, M., Peterson, A.: Dynamic Equations on Time Scales: An Introduction with Applications. Birkhäuser Inc, Boston, MA (2001)
Braverman, E., Karpuz, B.: Uniform exponential stability of first-order dynamic equations with several delays. Appl. Math. Comput. 218(21), 10468–10485 (2012)
Braverman, E., Karpuz, B.: On different types of stability for linear delay dynamic equations. Z. Anal. Anwend. 36(3), 343–375 (2017)
Du, N.H., Tien, L.H.: On the exponential stability of dynamic equations on time scales. J. Math. Anal. Appl. 331(2), 1159–1174 (2007)
Erbe, L.H., Xia, H., Yu, J.S.: Global stability of a linear nonautonomous delay difference equation. J. Differ. Equ. Appl. 1(2), 151–161 (1995)
Győri, I., Pituk, M.: Asymptotic stability in a linear delay difference equation. In: Proceedings of SICDEA, Veszprém, Hungary, 1995, Adv. Differ. Equ. Gordon and Breach, Amsterdam, 295–299 (1997)
Karpuz, B.: Volterra theory on time scales. Res. Math. 65(3–4), 263–292 (2014)
Karpuz, B.: Asymptotic stability of the complex dynamic equation \(u^\Delta -z\cdot u+w\cdot u^\sigma =0\). J. Math. Anal. Appl. 421(1), 925–937 (2015)
Karpuz, B., Öcalan, Ö.: Erratum to: “Stability for first order delay dynamic equations on time scales” [Comput. Math. Appl. 53, 1820–1831(2007)] by H. Wu and Z. Zhou. Comput. Math. Appl. 56(4), 1157–1158 (2008)
Karpuz, B., Öcalan, Ö.: Oscillation and nonoscillation of first-order dynamic equations with positive and negative coefficients. Dyn. Syst. Appl. 18(3–4), 363–374 (2009)
Krisztin, T.: On stability properties for one-dimensional functional–differential equations. Funkcial. Ekvac. 34(2), 241–256 (1991)
Kulenović, M.R.S., Ladas, G., Meimaridou, A.: Stability of solutions of linear delay differential equations. Proc. Am. Math. Soc. 100(3), 433–441 (1987)
Ladas, G., Qian, C., Vlahos, P.N., Yan, J.: Stability of solutions of linear nonautonomous difference equations. Appl. Anal. 41(1–4), 183–191 (1991)
Ladas, G., Sficas, Y.G., Stavroulakis, I.P.: Asymptotic behavior of solutions of retarded differential equations. Proc. Am. Math. Soc. 88(2), 247–253 (1983)
Muroya, Y.: On Yoneyama’s \(3/2\) stability theorems for one-dimensional delay differential equations. J. Math. Anal. Appl. 247(1), 314–322 (2000)
Peterson, A.C., Raffoul, Y.N.: Exponential stability of dynamic equations on time scales. Adv. Differ. Equ. 2, 133–144 (2005)
Rashford, M., Siloti, J., Wrolstad, J.: Exponential stability of dynamic equations on time scales. PanAm. Math. J. 17, 39–51 (2007)
Shen, J.H., Yu, J.S.: Asymptotic behavior of solutions of neutral differential equations with positive and negative coefficients. J. Math. Anal. Appl. 195(2), 517–526 (1995)
Wu, H., Zhou, Z.: Stability for first order delay dynamic equations on time scales. Comput. Math. Appl. 53(12), 1820–1831 (2007)
Yu, J.S., Cheng, S.S.: A stability criterion for a neutral difference equation with delay. Appl. Math. Lett. 7(6), 75–80 (1994)
Yoneyama, T.: On the \({3\over 2}\) stability theorem for one-dimensional delay-differential equations. J. Math. Anal. Appl. 125(1), 161–173 (1987)
Yoneyama, T.: The \(3/2\) stability theorem for one-dimensional delay-differential equations with unbounded delay. J. Math. Anal. Appl. 165(1), 133–143 (1992)
Yorke, J.A.: Asymptotic stability for one dimensional differential-delay equations. J. Differ. Equ. 7, 189–202 (1970)
Funding
Open access funding provided by the Scientific and Technological Research Council of Türkiye (TÜBİTAK).
Author information
Authors and Affiliations
Contributions
N.A. and B.K. wrote the main manuscript text and prepared all of the graphics together. All authors also reviewed the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Nour H. M. Alsharif and Basak Karpuz contributed equally to this work.
Appendices
Basics of Time Scales
A time scale which is represented by the symbol \(\mathbb {T}\), is a nonempty closed subset of reals \(\mathbb {R}\). The intervals with a subscript \(\mathbb {T}\) are used to indicate the ordinary interval intersects with \(\mathbb {T}\), i.e., \([a,b]_{\mathbb {T}}=[a,b]\cap \mathbb {T}\). The forward and backward jump operators, \(\sigma :\mathbb {T}\rightarrow \mathbb {T}\) and \(\rho :\mathbb {T}\rightarrow \mathbb {T}\), are respectively defined by \(\sigma (t)=\inf (t,\infty )_{\mathbb {T}}\) and \(\rho (t)=\sup (t,\infty )_{\mathbb {T}}\). A point t is called right or left-dense, if \(\sigma (t)=t\) or \(\rho (t)=t\), respectively, meanwhile, it is called right or left-scattered, if \(\sigma (t)>t\) or \(\rho (t)<t\), respectively. The graininess or forward step size map \(\mu :\mathbb {T}\rightarrow [0,\infty )_{\mathbb {R}}\) is given by \(\mu (t)=\sigma (t)-t\). For \(f:\mathbb {T}\rightarrow \mathbb {R}\) and \(t\in \mathbb {T}\), the \(\Delta \)-derivative \(f^{\Delta }(t)\) of f at the point t is defined to be the number, provided it exists with the property that, for given \(\varepsilon \in \mathbb {R}^{+}\), there is a neighborhood \(U_{t}\) of t such that
where \(f^{\sigma }= f\circ \sigma \) on \(\mathbb {T}\). A function f is said to be an rd-continuous function if it is continuous at right-dense points in \(t\in \mathbb {T}\) and has a finite limit at left-dense points. The set of rd-continuous and differentiable rd-continuous functions are respectively denoted by \(\textrm{C}_{\textrm{rd}}(\mathbb {T},\mathbb {R})\) and \(\textrm{C}_{\textrm{rd}}^{1}(\mathbb {T},\mathbb {R})\). For a function f, the so-called simple useful formula holds
where
For \(s,t\in \mathbb {T}\) and a function \(f\in \textrm{C}_{\textrm{rd}}(\mathbb {T},\mathbb {R})\), the \(\Delta \)-integral of f is defined by
where \(F\in \textrm{C}_{\textrm{rd}}^{1}(\mathbb {T},\mathbb {R})\) is an antiderivative of f, i.e., \(F^{\Delta }=f\) on \(\mathbb {T}^{\kappa }\). Assume that \(f\in \textrm{C}_{\textrm{rd}}(\mathbb {T},\mathbb {R})\) and \(t\in \mathbb {T}^{\kappa }\), then
Table 1 gives the explicit forms for the forward jump, \(\Delta \)-derivative, and \(\Delta \)-integral on the well-known time scales of reals, integers, and the quantum set, respectively.
Advanced Results on Time Scales
Some advanced results on time scales such as chain rule, derivative of inverse, substitution, Leibniz rule, and change of integration order are given in this section.
Theorem 2
([2, Theorem 1.93] Chain Rule) Assume that \(f\in \textrm{C}^{1}(\mathbb {T},\mathbb {R})\) is strictly increasing and \(f(\mathbb {T})=:\widetilde{\mathbb {T}}\) is a time scale. Further assume that \(g\in \textrm{C}^{1}(\widetilde{\mathbb {T}},\mathbb {R})\). Then
Remark 2
If \(\widetilde{\mathbb {T}}=\mathbb {T}\) holds in Theorem 2, then we get the familiar form \((g\circ {}f)^{\Delta }(t)=g^{\Delta }(f(t))f^{\Delta }(t)\) for \(t\in \mathbb {T}\).
Theorem 3
([2, Theorem 1.97] Derivative of Inverse) Assume that \(f\in \textrm{C}^{1}(\mathbb {T},\mathbb {R})\) is strictly increasing and \(f(\mathbb {T})=:\widetilde{\mathbb {T}}\) is a time scale. Then
Remark 3
If \(\widetilde{\mathbb {T}}=\mathbb {T}\) holds in Theorem 3, then we get the familiar form \((f^{-1})^{\Delta }(t)=\frac{1}{f^{\Delta }(f^{-1}(t))}\) provided that \(f^{\Delta }(f^{-1}(t))\ne 0\).
Theorem 4
(Cf. [2, Theorem 1.98] Substitution) Assume that \(a,b\in \mathbb {T}\) with \(b>a\) and \(\nu \in \textrm{C}_{\textrm{rd}}^{1}(\mathbb {T},\mathbb {R})\) is strictly increasing and \(\nu (\mathbb {T})=:\widetilde{\mathbb {T}}\) is a time scale. Furthermore, assume that g is a function such that \(g\circ \nu \in \textrm{C}_{\textrm{rd}}(\mathbb {T},\mathbb {R})\). Then
Theorem 5
([2, Theorem 1.117] Leibniz Rule) Let \( a\in \mathbb {T}^{\kappa }\) and \(f:\mathbb {T}\times \mathbb {T}^{\kappa }\rightarrow \mathbb {R}\). Assume that
-
(i)
f is continuous at (t, t) where \(t\in \mathbb {T}^{\kappa }\) with \(t>a\).
-
(ii)
\(f^{\Delta _{1}}(t,\cdot )\) is rd-continuous on \([a,\sigma (t)]_{\mathbb {T}}\), where \(\cdot ^{\Delta _{1}}\) denotes the derivative with respect to the first component.
-
(iii)
for every \(\varepsilon \in \mathbb {R}^{+}\), there exists a neighborhood \(U_{t}\) of t, independent of \(r\in [a,\sigma (t)]_{\mathbb {T}}\), such that
$$\begin{aligned} \mid {}f(\sigma (t),r)-f(s,r)-f^{\Delta _{1}}(t,r)(\sigma (t)-s)\mid \le \varepsilon \mid \sigma (t)-s\mid \ quad\text {for all}\ s\in U_{t}. \end{aligned}$$
Then
Theorem 6
([8, Theorem 3.2] Change of Integration Order) Let \(a\in \mathbb {T}^{\kappa }\), \(b\in \mathbb {T}\) and \(f:\{(t,s)\in \mathbb {T}\times \mathbb {T}:\ a\le {}s\le {}t\le {}b\}\rightarrow \mathbb {R}\) be an rd-continuous function. Let \(a\in \mathbb {T}^{\kappa }\), \(b\in \mathbb {T}\) and \(f:\{(t,s)\in \mathbb {T}\times \mathbb {T}^{\kappa }:\ a\le {}s\le {}t\le {}b\}\rightarrow \mathbb {R}\). Assume that
-
(i)
f is bounded function,
-
(ii)
\(f(\cdot ,\cdot )\), \(\int _{\cdot }^{b}f(\xi ,\cdot )\Delta \xi \) and \(\int _{a}^{\cdot }f(\cdot ,\eta )\Delta \eta \) are rd-continuous on \([a,b]_{\mathbb {T}^{\kappa }}\),
-
(iii)
for every \(\varepsilon \in \mathbb {R}^{+}\), there exists a neighborhood \(U_{t}\) of t, independent of \(r\in [a,b]_{\mathbb {T}}\) with \(r\le {}s\le {}t\), such that
$$\begin{aligned} \mid {}f(t,r)-f(s,r)\mid {}<\varepsilon \quad \text {for all}\ s\in U_{t}. \end{aligned}$$
Then,
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Alsharif, N.H.M., Karpuz, B. A Test for Global Attractivity of Linear Dynamic Equations with Delay. Qual. Theory Dyn. Syst. 23, 118 (2024). https://doi.org/10.1007/s12346-023-00907-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12346-023-00907-8