
Abstract
The present work aims at introducing a fast and effective CFD-based automatic loop for optimization of rotorcraft components. The automatic loop presented here was strictly designed around an innovative Multi Objective Evolutionary Algorithm, developed at University of Padua, namely the GeDEA-II. Recent papers showed its excellent performance when tested on state-of-the-art problems. In order to test the performance of this algorithm two test cases are presented, each having its peculiar characteristics. The first problem regards the single-objective, multi-constraints aerodynamic optimization of the ERICA tilt-rotor cockpit region. The second one is a multi-point multi-constraint optimization of the left intake of the AgustaWestland AW101 helicopter. Results demonstrate the effectiveness of this automatic optimization loop in tackling real-word engineering problems.


























































































































Similar content being viewed by others


Notes
Please visit the web site http://www.cleansky.eu for more elucidations.
A computer cluster is a group of linked computers, working together closely so that in many respects they form a single computer. The components of a cluster are commonly, but not always, connected to each other through fast local area networks. Clusters are usually deployed to improve performance and/or availability over that of a single computer, while typically being much more cost-effective than single computers of comparable speed or availability.
Vilfredo Pareto (1848–1923): Italian engineer, economist and sociologist.
Let us consider three vectors in \({\mathbb {R}}^3\) design space, namely a = (1,0,0), b = (0,1,0), and c = (0,0,1). There can be found three couples of linearly independent vectors, that is [a,b], [a,c] and [b,c] but only a triplet of mutually and simultaneously independent vectors, that is the triplet [a,b,c]. This simple demonstration remains valid when extended to the \({\mathbb {R}}^n\) space.
Individual mutation probability (probability that a certain individual undergoes mutation); individual recombination probability (probability that a certain pair of individuals undergoes recombination); variable mutation probability (probability that a certain variable in a given individual is mutated); variable swap probability (probability that a certain pair of variables is swapped during recombination); variable recombination probability (probability that the SBX recombination operator is used for a given pair of variables; this decision is independent from variable swap probability); \(\eta _{mutation}\) (distribution index for mutation operator); \(\eta _{recombination }\)(distribution index for recombination operator).
This software is available for public use at PISA website http://www.tik.ee.ethz.ch/pisa/.
The Hypervolume is a Pareto compliant indicator as stated in [22].
The contribution of the outliers is negligible from a statistical point of view.
Sponsons are projections from the sides of an aircraft or helicopter, for protection, stability, or the mounting of equipment such as armaments or lifeboats, etc. They are often used in larger helicopters where the internal space of the sponson can be used for fuel or to house landing gear without reducing cargo or passenger space in the fuselage.
The aspect ratio is defined as the ratio of the prism base length to the prism layer height.
Tcl (Tool Command Language), commonly pronounced “tickle”, is a scripting language like Perl, JavaScript, Born, and Korn. It can be used coupled with HyperMesh, by calling HyperMesh commands directly from a Tcl script.
References
Adelman HM, Mantay WR (1991) Integrated multidisciplinary design optimization of rotorcraft. J Aircr 28(1):22–28
Agrawal RB, Deb K (1994) Simulated binary crossover for continuous search space. Technical report, Complex Systems
Aircrew station vision requirements for military aircraft. Military standard mil-std-850b. Technical report, 1970
Altair Engineering. HyperMesh & BatchMesher User’s Guide. Altair, (2009)
Amir M (2008) Application of piezoelectric actuators at sub- sonic speeds. J Aircr 45(4):1419–1430
Amitay M, Glezer A (2006) Aerodynamic flow control using synthetic jet actuators, vol 330., Lecture Notes in Control and Information. Sciences Springer, Berlin/Heidelberg
Anderson BH (1987) Inlets, ducts and nozzles. Technical report, NASA, CP-3049
Ansys Inc. FLUENT User’s Guide, release 14.0. ANSYS, (2010)
Ansys Inc. Tgrid User’s Guide, release 14.0. ANSYS, (2010)
Bäck T (1994) Selective pressure in evolutionary algorithms: a characterization of selection mechanisms. In: Proceedings of the first IEEE conference on evolutionary computation. IEEE Press, Piscataway, pp 57–62
Bäck T, Schwefel H-P (1993) An overview of evolutionary algorithms for parameter optimization. Evol Comput 1(1):1–23
Bäck T (1996) Evolutionary algorithms in theory and practice: evolution strategies, evolutionary programming. genetic algorithms. Oxford University Press, Oxford, UK
Bandyopadhyay PM (1989) Viscous drag reduction of a nose body. AIAA J 27(3):274–282
Bergamaschi L, Zilli G, Venturin M (2008) Metodi di line-search. Lecture Notes. Dipartimento di Metodi e Modelli Matematici Universitá di Padova
Bergamaschi L, Zilli G, Venturin M (2008) Metodi di ottimizzazione. lecture notes. Dipartimento di Metodi e Modelli Matematici Universitá di Padova
Bleuler S, Laumanns M, Thiele L, Zitzler E (2003) PISA - A platform and programming language independent interface for search algorithms. In: Fonseca CM et al (eds) Conference on evolutionary multi-criterion optimization (EMO 2003), vol 2632. LNCSSpringer, Berlin, pp 494–508
Calarese W, Pan Crisler W, Gustafson GL (1985) Afterbody drag reduction by vortex generators
Campanardi G, Zanotti A, Macchi C (2008) Final complete wind tunnel test database. technical report. Technical report, NICETRIP/POLIMI/WP4.TR007/4.0, Version 4.0
Catalano FM (2004) Afterbody drag reduction by vortex generators. Acta Polytechnica 44(3):274–282
Celi R (1999) Recent applications of design optimization to rotorcraft—a survey. J Aircr 36(1):176–189
Chattopadhyay A, Narayan J (1993) Optimum design of high speed prop-rotors using a multidisciplinary approach. Eng Optim 22(1):1–17
Coello Coello CA, Lamont GB, Van Veldhuizen DA (2006) Evolutionary algorithms for solving multi-objective problems (Genetic and evolutionary computation). Springer-Verlag New York Inc, Secaucus
Coello Coello CA (2002) Theoretical and numerical constraint-handling techniques used with evolutionary algorithms: a survey of the state of the art. Comput Methods Appl Mech Eng 191(11–2):1245–1287
Comis Da Ronco C, Benini E (2013) A simplex crossover based evolutionary algorithm including the genetic diversity as objective. Appl Soft Comput 13(4):2104–2123
Comis Da Ronco C, Benini E (2012) Gedea-ii: A novel evolutionary algorithm for multi-objective optimization problems based on the simplex crossover and the shrink mutation. In:Lecture Notes in Engineering and Computer Science: Proceedings of The World Congress on Engineering and Computer Science 2012, WCECS 2012, 24–26 October, 2012, San Francisco, pp 1298–1303
Comis Da Ronco C, Benini E (2012) Gedea-ii: a simplex-crossover based multi objective evolutionary algorithm including the genetic diversity as objective. In: Proceedings of the fourteenth international conference on genetic and evolutionary computation conference companion, pp 619–620
Corne DW, Knowles JD, Oates MJ (2000) The pareto envelope-based selection algorithm for multiobjective optimization. In Proceedings of the Parallel Problem Solving from Nature VI Conference. Springer. Berlin, pp 839–848
Deb K, Goyal MA (1996) Combined genetic adaptive search (geneas) for engineering design. Comput Sci Inform 26:30–45
Deb K (1999) Multi-objective genetic algorithms: problem difficulties and construction of test problems. Evol Comput 7:205–230
Deb K, Agrawal S, Pratap A, Meyarivan T (2000) fast elitist non-dominated sorting genetic algorithm for multi-objective optimization: Nsga-ii. Springer, Berlin, pp 849–858
Deb K (2001) Multi-objective optimization using evolutionary algorithms. Wiley, New York
Deb K, Thiele L, Laumanns M, Zitzler E (2001) Scalable test problems for evolutionary multi-objective optimization. Technical report, Computer Engineering and Networks Laboratory (TIK), Swiss Federal Institute of Technology (ETH)
di Milano P (2010) Green rotorcraft technical report. specification of geometrical constraints and of the design point for the optimisation task, together with the revised erica catia file. Technical report
Eiben AE, Bäck T (1997) Empirical investigation of multiparent recombination operators in evolution strategies. Evol Comput 5(3):347–365
Farokhi S (2008) Aircraft propulsion. Wiley, New York
Fletcher R, Reeves CM (1964) Function minimization by conjugate gradients. Comput J 7:149–154
Fogel DB (1995) Evolutionary computation: toward a new philosophy of machine intelligence. IEEE Press, Piscataway
Fonseca CM, Fleming PJ (1993) Genetic algorithms for multiobjective optimization: Formulation, discussion and generalization. In: Proceedings of the fifth international conference on genetic algorithms. Morgan-Kaufmann, San Francisco
Friedmann PP (1991) Helicopter vibration reduction using structural optimization with aeroelastic/multidisciplinary constraints—a survey. J Aircr 28(1):8–21
Gabriel E (1968) Drag estimation of v/stol aircraft. Technical report, Boeing Vertol Report D8–2194-1
Gad el Hak M (2000) Flow control. Cambridge University Press, Piscataway
Gates GC (1989) Aircraft propulsion systems technology and design. AIAA Education Series, pp 277–303
Gessow A, Meyers GC (1952) Aerodynamics of the helicopter. Macmillan, New York
Giancamilli G, Nannoni F, Cicalè M (2001) Erica: the european advance tilt-rotor. in European Rotorcraft Forum
Gieseng J, Barthelemy JFM (1998) Summary of industry mdo applications and needs. AIAA Paper 98–4737
Godard G, Stanislas M (2006) Control of a decelerating boundary layer. part 3: Optimization of round jets vortex generators. Aerosp Sci Technol 10(6):455–464
Goldberg DE (1989) Genetic algorithms in search. Optimization and machine learning. Addison-Wesley Longman Publishing Co.Inc, Boston
Hajela P (1999) Nongradient methods in multidisciplinary design optimization: status and potential. J Aircr 36(1):255–265
Hassan AA, Martin PB, Tung C, Cerchie D, Roth J (2005) Active flow control measurements and cfd on a transport helicopter fuselage. In: Proceedings of the 61st annual AHS international forum and airfoil. pp 349–369
Hefner J, Bushnell D (1977) An overview of concepts for aircraft drag reduction. technical report, special course on concepts for drag reduction. AGARD Special Course, AGARD Report No. 654
Heyes AL, Smith DAR (2005) Modification of a wing tip vortex by vortex generators. Aerosp Sci Technol 9(6):469–475
Hill P, Peterson C (1992) Mechanics and thermodynamics of propulsion. Addison-Wesley Publishing Company, Reading
Holmes BJ, Obara CJ (1982) Observations and implications of natural laminar flow on practical airplane surfaces. J Aircr 20(12):993–1006
Holst TL, Pulliam TH (2003) Evaluation of genetic algorithm concepts using model problems, part ii: Multi-objective optimization. Technical report
Hooke R, Jeeves TA (1961) Direct search solution of numerical and statistical problems. J ACM 8(2):221–229
Houghton EL, Brock AE (1970) Aerodynamics for engineering students, 2nd edn. Edward Arnold, New York
Hunecke K (1997) Jet engines: fundamentals of theory, design, and operation. Publishers & Wholesaler, New York
Joslin RD (1998) Aircraft laminar flow control. Annu Rev Fluid Mech 30(1):1–29
Kagambage E, Dimitriadis G (2008) Design, manufacture and instalation of a scaled model of the nicetrip engine nacelle in the ulg wind tunnel. Technical report
Kennedy J, Eberhart R (1995) Particle swarm optimization. proceedings. In: IEEE International Conference on Neural Networks, pp 1942–1948
Kirkpatrick S, Gelatt CD, Vecchi MP (1983) Optimization by simulated annealing. Science 220(4598):671–680
Knowles J, Corne D, Deb K (2006) Multiobjective problem solving from nature: from concepts to applications. Natural computing series. Springer-Verlag New York Inc, Secaucus
Krishna Prasad K, Choi KS, Truong TV (1996) Emerging techniques in drag reduction. Wiley, New York
Kursawe F (1991) A variant of evolution strategies for vector optimization. In Schwefel HP, Manner R (eds) Parallel problem solving from nature. 1st Workshop, PPSN I, volume 496 of Lecture Notes in Computer Science. Springer-Verlag, Berlin, pp 193–197
Lamousin HJ, Waggenspack WN Jr (1994) Nurbs-based free-form deformations. IEEE Comput Graph Appl 14:59–65
Lee J-W, Min B-Y, Byun Y-H, Kim S-J (2006) Multipoint nose shape optimization of space launcher using response surface method. J Spacecr Rocket 43(1):137–146
Lee C, Hong G, Ha Q (2002) Effectiveness of synthetic jets enhanced by instability of tollmien-schlichting waves. AIAA Paper
Lin JC, Robinson SK, McGhee RJ, Valarezo WO (1994) Separation control on high-lift airfoils via micro-vortex generators. J Aircr 31(6):1317–1323
Marco N, Desideri JA (1999) Multilevel parametrization for aerodynamical optimization of 3d shapes. Technical report
Matlab (2010) Genetic algorithm and direct search toolbox, theory guide, 2nd edn
Matlab (2010) Optimization toolbox, theory guide, 2nd edn
S. Melone, Garcia-Duffy, and C. D’Andrea A (2010) Exploitation of active controls and morphing technologies to enhance rotor aerodynamic performance in hover conditions. American Helicopter Society Specialistís Conference on Aeromechanics, Fishermanís
Menter FR, Langtry R, Völker S (2006) Transition modelling for general purpose CFD codes. Flow Turbul combust 77(1–4):277–303
Miura H (1985) Applications of numerical optimization methods to helicopter design problems—a survey. Vertica 9(2):141–154
Mossi K, Castro N, Bryant R, Mane P (2005) Boundary condition effects on piezo-synthetic jets. Integr Ferroelectr 71(1):257– 266
Nelder JA, Mead R (1965) A simplex method for function minimization. Comput J 7(4):308–313
North Atlantic Treaty Organization. Advisory Group for Aerospace Research, Development. Fluid Dynamics Panel, and Von Karman Institute for Fluid Dynamics. Aircraft Drag Prediction and Reduction. AGARD report. North Atlantic Treaty Organization, Advisory Group for Aerospace Research and Development, (1985)
Ono I, Kobayashi S (1997) A real-coded genetic algorithm for function optimization using unimodal normal distribution crossover. In: Proceedings of the seventh international conference on genetic algorithms, pp 246–253
Pagnano G (2005) Il convertiplano erica: evoluzione della ricerca nei programmi quadro europei. CRUI Viaggio della Ricerca in Italia, Milano, Agusta coordinamento R&T, p 2005
Parsons JS, Goodson RE, Goldschmied FR (1974) Shaping of axisymmetric bodies for minimum drag in incompressible flow. J Hydronaut 8(3):100–107
Periaux J (2003) Genetic algorithms in aeronautics and turbomachinery. Blackwell Science, Chichester
Politecnico di Milano (2008) Nicetrip: final complete wind tunnel test data base for aircraft sizing, suitable for use by the codes of the partners. Technical report
Powell MJD (1964) An effcient method for finding the minimum of a function of several variables without calculating derivatives. Comput J 7(2):155–162
J. Reneaux and J. Preist (1996) Control of the attachment line contamination. In: 2nd European forum on laminar flow technology, Bordeaux, 1996
Robert JP (1992) Drag reduction: an industrial challenge. Technical report
Rosenbrock HH (1960) An automatic method for finding the greatest or least value of a function. Comput J 3(3):175–184
Samareh JA (1999) A survey of shape parameterization techniques. J Aircr 36:97–104
Seddon J, Goldsmith EL (1999) Intake Aerodynamics. AIAA education series. Blackwell Science, Oxford
Sederberg TW, Parry SR (1986) Free-form deformation of solid geometric models. In: Proceedings of the 13th annual conference on computer graphics and interactive techniques. ACM, New York, USA, pp 151–160. doi:10.1145/15922.15903
Seifert A (1993) Oscillatory blowing: a tool to delay boundary layer separation. AIAA J 31(11):2052–2060
Simpson RL (2001) Junction flows. Annu Rev Fluid Mech 33:415–445
Sobieszczanski-Sobieski J, Haftka RT (1997) Multidisciplinary aerospace design optimization: survey of recent developments. Struct Optim 14(1):1–23
Spall JC (2004) Introduction to stochastic search and optimization: estimation, simulation, and control. J Am Stat Assoc 99:1204–1205
Spendley W, Hext GR, Himsworth FR (1962) Sequential application of simplex designs in optimization and evolutionary operation. Technometrics 4:441–461
Stanewsky E (2001) Adaptive wing and flow control technology. Progress Aerosp Sci 37(7):583–667
Thomas SWA (1984) Aircraft drag reduction technology—a summary
Toffolo A, Benini E (2002) Genetic diversity as an objective in multi-objective evolutionary algorithms. Evol Comput 11:583–667
Tsutsui S, ans Yamamura M, Higuchi T (1999) Multi-parent recombination with simplex crossover in real coded genetic algorithms. In: Proceedings of the GECCO-99, pp 657–644
Tsutsui S, Ghosh A (1998) A study on the effect of multiparent recombination in real coded genetic algorithms. In: IEEE world congress on computational intelligence. The 1998 IEEE international conference on 4–9 May 1998. IEEE, Anchorage, AK, pp 828–833. doi:10.1109/ICEC.1998.700159
Vecchio A, Kurowski M, D’Alascio A (2008) Synthesis report on technology review of active devices for blunt fuselage drag reduction. (first draft version including technology review on implementation aspects of synthetic or pulsed jets). Technical report
Viswanath P (2002) Aircraft viscous drag reduction using riblets. Progress Aerosp Sci 30(30):571–600
Von Karman Institute for Fluid Dynamics (2009) Flow control: fundamentals, advances and applications. Lecture Series
Von Mises R (1959) Theory of flight
Walsh MJ (1983) Riblets as a viscous drag reduction technique. AIAA J 21(4):485–486
Warsop C, Hucker M, Press AJ (2007) Pulsed air-jet actuators for flow separation control. Flow Turbul Combust 78(3–4):251–281
Wolpert DH, Macready WG (1997) No free lunch theorems for optimization. IEEE Transa Evol Comput 1(1):67–82
You D, Moin P (2006) Large-eddy simulation of flow separation over an airfoil with synthetic jet control. Annual Research, Briefs, pp 337–346
Young T (1997) Investigation of hybrid laminar flow control (hlfc) surfaces. Aircr Des 2(2–3):127–146
Zitzler E, Deb K, Thiele L (2000) Comparison of multiobjective evolutionary algorithms: empirical results. Evol Comput 8:173–195
Zitzler E, Deb K, Thiele L (1999) Comparison of multiobjective evolutionary algorithms on test functions of different difficulty. In: Genetic and evolutionary computation conference (GECCO 1999): bird-of-a-feather workshop on multi-criterion optimization
Zitzler E, Künzli S (2004) Indicator-based selection in multiobjective search. In X. Yao et al. (eds) Conference on Parallel Problem Solving from Nature (PPSN VIII), vol 3242. Springer, Berlin, pp 832–842
Zitzler E, Laumanns M, Thiele L (2002) SPEA2: Improving the strength pareto evolutionary algorithm for multiobjective optimization. In K.C. Giannakoglou et al. (eds) Evolutionary methods for design, optimisation and control with application to industrial problems (EUROGEN 2001), International Center for Numerical Methods in Engineering (CIMNE), pp 95–100
Acknowledgments
The present research has been funded in the framework of the Joint Technology Initiatives: Clean Sky under grant agreement number 270609 “CODE-Tilt, Contribution to design optimization of tiltrotor components for drag reduction.” Authors acknowledge Antonio Saporiti and the Aerodynamic Office of AgustaWestland for the invaluable support they have given to this work.
Author information
Authors and Affiliations
Corresponding author
Appendix A: Methodology for Assessing the Compliance with the Visibility Requirements
Appendix A: Methodology for Assessing the Compliance with the Visibility Requirements
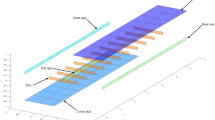
Visibility requirements are to be satisfied during certification campaign. For this reason, it is vital to establish if a particular aircraft configuration meets these requirements. In order to establish whether a particular parameterized configuration provides adequate external vision from within the aircrew station or not, a rectilinear graph showing the total vision plot must be built up. The vision requirements set forth in this paragraph are applicable to the ERICA configuration introduced in the results section present within the Sect. 7.7.1 and are given relative to the longitudinal fuselage reference line. Total vision envelope of the baseline ERICA configuration is depicted in Fig. 123 and compared to the envelope suggested in [3] for a transport side-by-side pilot aircraft. As apparent, while the Down Angles of the baseline ERICA cockpit are nearly coincident with the values given by certification rules, the Up Angles envelope largely overcomes the certification ones.
Figure 123 shows the total vision envelope (\(\pm 110^{\circ }\) in azimuth and \(\pm 90^{\circ }\) in elevation), referred to the baseline configuration of the ERICA.

Total vision envelope for ERICA nose baseline configuration
The plots shall reflect the unobstructed vision area, which is defined as that area of transparent material through which vision is unobstructed by structure, edge bonding material, or any other material, which prohibits clear vision. Convention for azimuth angles is shown in Fig. 124. The reference plane, from which the vision angles are specified, shall be the pilot’s horizontal vision plane (or line) with respect to the specific aircraft longitudinal fuselage reference line (see Fig. 124). The zero reference in azimuth shall be straight ahead of the design eye position.

Assumed azimuth angles convention
A subroutine written in Tcl Footnote 11 script language was created in order to find, for each azimuth coordinate, the intersection between the iso-azimuth lines and the windscreen edges. Based on these values, the Up and Down angles were then calculated via a Matlab script. Definition of Up angles and Down angles is clearly visible in Fig. 125.

Assumed elevation angles convention
Up angle is defined as the angle ranging from the horizontal vision plane to the intersection with the upper windscreen edge (at that particular azimuth angle). Down angle is defined as the angle ranging from the horizontal vision plane to the intersection with the lower windscreen edge (once again, at that particular azimuth angle).
It follows that for each azimuth angle, two elevation angles can be defined, that is the Up and the Down angles. The envelope of these angles constitute the total vision plot of the investigated aircraft configuration, and it has been already presented in Fig. 123.
The zero reference in azimuth is coincident with the pilot eye (as suggested in [3]). As far as the ERICA nose opti-mization problem is concerned, it is located at x = 2,976 mm, y = 525 mm and z = 1,358 mm.
During the optimization run, the calculated Up and Down angles related to the deformed configurations were compared to those reported in Table 33.
In the case the calculated angles were lower or equal than the baseline ones, the parameterized configuration was automatically replaced by a new one. This replacement was performed until the visibility requirements were met. Hard constraints were set for every azimuth angles, exception given for the low azimuth angles, for which only soft constraints were fixed. This choice was made in order not to penalize excessively the design space exploration.
Rights and permissions
About this article

Cite this article
Comis Da Ronco, C., Ponza, R. & Benini, E. Aerodynamic Shape Optimization in Aeronautics: A Fast and Effective Multi-Objective Approach. Arch Computat Methods Eng 21, 189–271 (2014). https://doi.org/10.1007/s11831-014-9123-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11831-014-9123-y